
Alper MÜLAYİM
Kaan UÇAR
Mehmed MUSTAFA
Mehmet Gürol ÇAY
Mutlu POLATCAN
Özgü GÖKSU
Selman AHATLI
Yunus ATMACA
Projede Yer Alanlar


Alper MÜLAYİM
Kaan UÇAR
Mehmed MUSTAFA
Mehmet Gürol ÇAY
Mutlu POLATCAN
Özgü GÖKSU
Selman AHATLI
Yunus ATMACA
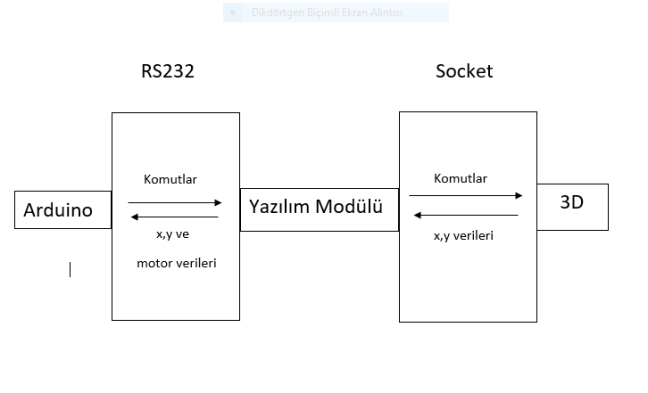
Arduino ile Arayüz arasında iletişim RS232 ile sağlanmaktadır.
Arayüz ile 3D arasındaki iletişim TCP Socket ile sağlanmaktadır.
Haberleşme için protokol tanımlanmıştır.
Arayüz QT C++ kütüphanesi ile tasarlandı. Tasarlanan arayüz topun üstten görünümü ,
topun hareketini gösteren x -t ve y -t grafikleri ile düzleme gönderilecek komutlar ile ek modül arayüzü ve 3D modülünü çalıştıran komut bulunmaktadır.
Arayüz bilgileri Arduinodan R S232 kütüphanesi ile almaktadır


1- Topun Düzlem Üzerindeki Görüntüsü
Topun düzlem üzerinde üstten görüntüsü nü gösteren panel. Topun anlık hareketini
göstermektedir.
2- x – t grafiği
Topun düzlem üzerindeki x ekseninde zamana göre hareket değişimini göstermektedir.
3- y – t grafiği
Topun düzlem üzerindeki y ekseninde zamana göre hareket değişimini
göstermektedir.
4- Komut Butonları
Komut Buttonları ve 3D Ekran Butonu
Topun dengede tutulabilmesi ve hesaplanan değerlerdeki hata paylarının giderilmesi
için PID (Proportional-Integral -Derivative) oransal-integral -türevsel denetleyici PID kontrol döngüsü yöntemi kullanıldı. PID geri besleme yönteminde Ki, Kp, Kd değerlerinin hesaplanması için ise Ziegler–Nichols ayarlama metodu ile heuristik olarak değerleri hesaplandı. Kp değerinin yüksek tutulması durumunda ise düzlemde hızlı hareketler meydana geldiği gözlemlendi. PID kütüphanesi olarak PID_V1.h kullanılmıştır.
Kullanılan PID Parametreleri :
Zaman değeri: 30 ms
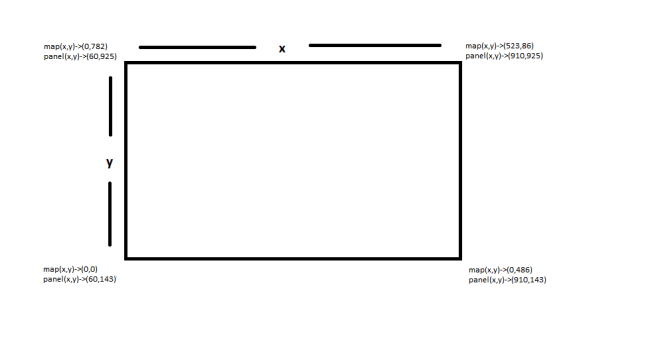
Merkezde sabit konum değerleri olarak
X: 486
Y: 523 (set-points)
Projede kullanılan PID parametre değerleri:
1.Servo motor için(X düzlemi):
Kp: 0.135
Ki: 0.007
Kd: 0.014
2. Servo motor için(Y düzlemi):
Kp: 0.1
Ki : 0.0025
Kd : 0.01
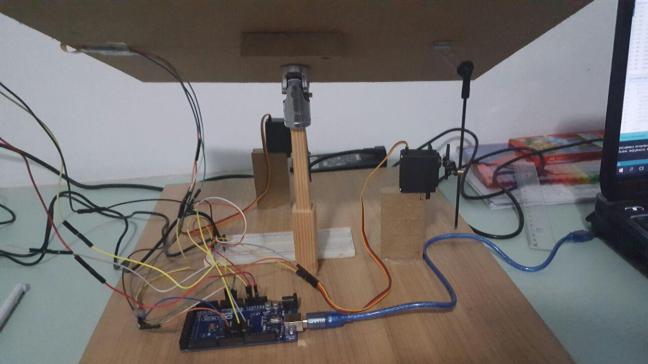
Donanımlarla uygun halde çalışması için tasarlanan düzlem için gerekli malzemeler;
Fiziksel olarak donanımın diğer parçaların bulunacağı ana gövde kontraplak (3mm)
ve sunta (1.8cm) kullanıldı. Dokunmatik panelin konulacağı kontraplağın istediğimiz açılarda
hareket edebilmesi için mafsal kullanıldı.

Motor ve kontraplak arasındaki bağlantılar için:
● İki adet çelik Yeke L14×H17x28mm D3mm 3.75gr
● İki adet easy Link 3mm
● İki adet ball link 30-50cc
● İki adet carbon pushrod
● Mafsal 1/2 inc









Topun düzlem üzerindeki konumunu tespit edebilmek için düzlem üzerine rezistif
dokunmatik panel yerleştirmeyi tercih ettik. Panel boyutu için 15 in ç’in ideal olacağına kara
verildi.
Topun düzlem üzerindeki konumunu tespit edebilmek için düzlem üzerine rezistif
dokunmatik panel yerleştirmeyi tercih ettik. Panel boyutu için 15 in ç’in ideal olacağına kara
verildi.

Yukarıdaki modülleri Arduino Mega 2560 üzerinde kullanmaya karar verildi. Çok fazla
işlem gücüne ihtiyacımız olmadığndan yeterli oldu.. Dokunmatik Panel ve servo motorların fazladan bir sürücü devresi gerektirmeden Arduino üzerinden sür ülebilmesi de tercih nedenlerimizden biri oldu. Arduino çeşitlerinden Megayı tercih etme sebeplerimizden biri de daha fazla pin sayısına sahip olmasıdır.

Donanım Malzemeleri
● 1 adet Arduino Mega 2560 R3
● 2 adet MG996 Metal Servo Motor
● 1 adet HD-170 Model 4 telli Rezistif Dokunmatik Panel
Yazılım Özellikleri
● Arayüz için Qt
● Genel Yazılım C++
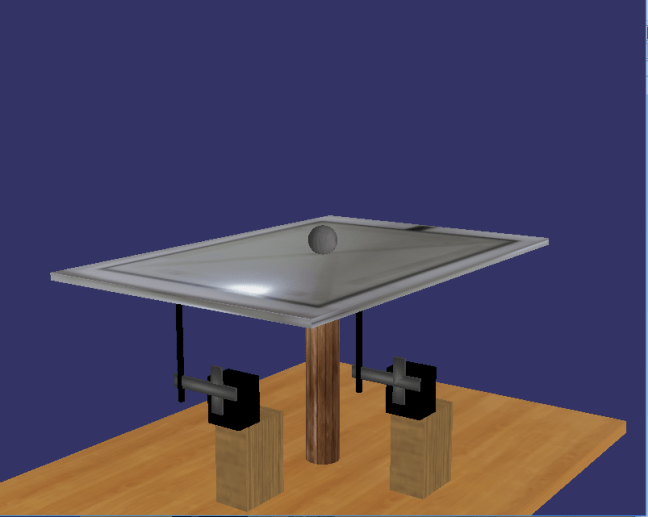
● 3D Animasyon OpenSceneGraph
● Arduino kütüphaneleri
○ Arduino.h
○ Servo.h
○ TouchScreen.h
○ PID_v1.h
Projenin amacı belirli bir topu , bilgisayar tabanlı sistemlerde elektronik cihazlar yardımıyla dengede tutabilmektir. Proje de dengede tutmaktan kastedilen durum ise ; topun merkez olarak belirtilen orta noktaya gelmesini sağlamaktır.
Proje dersi kapsamında başlatılan topu bir düzlem üzeri nde dengede tutma projesi
için ilk başta bilgi elde edilebilmesi için hem yazılım, hem donanım ile ilgili araştırmalar yapıldı. Proje ile ilgili olarak internette bir çok video ve doküman incelenip, nasıl bir yapısı olacağı ile ilgili bilgiler elde edildi. Grup olarak bir araya gelip elde edilen bilgilerin kullanılması için nasıl bir yol izleyeceğimiz proje de kullanılacak malzemelerin neler olacağıyla ilgili görüşmeler yapıldı.
Ball on Plate Project
Gebze Teknik Üniversitesi BİL395 dersi kapsamında grup projemiz olan Ball on Plate ile ilgili detaylı bilgilere ulaşabileceğiniz bir site…
